Tehnica de poziționare pe care am descris-o în capitolul 2 este denumită poziționare bazată pe coduri, deoarece receptorul corelează și utilizează codurile pseudo-aleatoare transmise de patru sau mai mulți sateliți pentru a determina distanțele până la sateliți. Pornind de la aceste distanțe și știind unde se află sateliții, receptorul își poate stabili poziția cu o precizie de câțiva metri.
Ce este RTK (Real-Time Kinematic)?
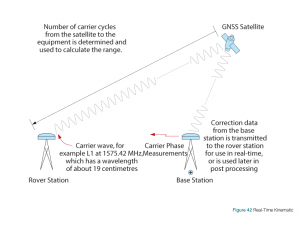
RTK este acronimul de la Real-Time Kinematic (cinematică în timp real) și este o tehnică care utilizează distanța bazată pe purtătoare și care oferă distanțe (și, prin urmare, poziții) care sunt cu câteva ordine de mărime mai precise decât cele disponibile prin poziționarea bazată pe coduri. Tehnicile RTK sunt complicate. Conceptul de bază constă în reducerea și eliminarea erorilor comune unei perechi stație de bază și rover, așa cum este ilustrat în figura 42.
Precizia GPS RTK: Ce precizie are RTK?
RTK este utilizat pentru aplicații care necesită precizii mai mari, cum ar fi poziționarea la nivel de centimetru, cu o precizie de până la 1 cm + 1 ppm.
Calcularea razei de acțiune
La un nivel conceptual de bază, raza de acțiune este calculată prin determinarea numărului de cicluri de purtătoare dintre satelit și stația rover, apoi prin înmulțirea acestui număr cu lungimea de undă a purtătoarei.
Razemele calculate includ încă erori din surse precum ceasul satelitului și efemeridele, precum și întârzierile ionosferice și troposferice. Pentru a elimina aceste erori și pentru a profita de precizia măsurătorilor bazate pe purtătoare, performanța RTK necesită ca măsurătorile să fie transmise de la stația de bază la stația rover.
Este necesar un proces complicat numit „rezolvarea ambiguității” pentru a determina numărul de cicluri întregi. În ciuda faptului că este un proces complex, receptoarele GNSS de înaltă precizie pot rezolva ambiguitățile aproape instantaneu. Pentru o scurtă descriere a ambiguităților, a se vedea secțiunea Măsurări GNSS – Precizia codului și a fazei purtătoarelor, mai devreme în acest capitol. Pentru informații suplimentare despre rezolvarea ambiguităților, consultați referințele de la sfârșitul acestei cărți.
Roverele își determină poziția folosind algoritmi care încorporează rezolvarea ambiguităților și corecția diferențială. La fel ca DGNSS, precizia poziției pe care o poate obține roverul depinde, printre altele, de distanța sa față de stația de bază (denumită „linia de bază”) și de precizia corecțiilor diferențiale. Corecțiile sunt la fel de precise ca și locația cunoscută a stației de bază și calitatea observațiilor prin satelit ale stației de bază. Selectarea amplasamentului este importantă pentru a minimiza efectele de mediu, cum ar fi interferențele și căile multiple, la fel ca și calitatea receptoarelor și a antenelor stației de bază și a roverului.
Rețeaua RTK
Rețeaua RTK se bazează pe utilizarea mai multor stații permanente foarte îndepărtate. În funcție de implementare, datele de poziționare de la stațiile permanente sunt comunicate periodic unei stații centrale de procesare. La cererea terminalelor utilizatoare RTK, care își transmit poziția lor aproximativă către stația centrală, stația centrală calculează și transmite informațiile de corecție sau poziția corectată către terminalul utilizator RTK. Avantajul acestei abordări este o reducere globală a numărului de stații de bază RTK necesare. În funcție de implementare, datele pot fi transmise prin legături radio celulare sau prin alte medii fără fir.
.