La tecnica di posizionamento che abbiamo descritto nel Capitolo 2 viene definita posizionamento basato sul codice, perché il ricevitore correla e utilizza i codici pseudorandom trasmessi da quattro o più satelliti per determinare le distanze dai satelliti. Da questi intervalli e sapendo dove si trovano i satelliti, il ricevitore può stabilire la sua posizione entro pochi metri.
Che cos’è RTK (Real-Time Kinematic)?
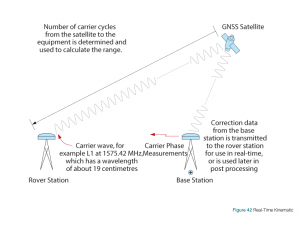
RTK sta per Real-Time Kinematic ed è una tecnica che utilizza la telemetria basata sulla portante e fornisce intervalli (e quindi posizioni) che sono ordini di grandezza più precisi di quelli disponibili attraverso il posizionamento basato sul codice. Le tecniche RTK sono complicate. Il concetto di base è quello di ridurre e rimuovere gli errori comuni a una coppia stazione base e rover, come illustrato nella Figura 42.
Precisione RTK GPS: Che precisione è RTK?
RTK è usato per applicazioni che richiedono precisioni più elevate, come il posizionamento a livello centimetrico, fino a 1 cm + 1 ppm di precisione.
Calcolo della portata
A un livello concettuale molto elementare, la portata viene calcolata determinando il numero di cicli di portante tra il satellite e la stazione rover, quindi moltiplicando questo numero per la lunghezza d’onda della portante.
Le portate calcolate includono ancora errori da fonti quali l’orologio del satellite e le effemeridi, e ritardi ionosferici e troposferici. Per eliminare questi errori e per sfruttare la precisione delle misure basate sulle portanti, le prestazioni RTK richiedono che le misure siano trasmesse dalla stazione base alla stazione rover.
Un processo complicato chiamato “risoluzione dell’ambiguità” è necessario per determinare il numero di cicli interi. Nonostante sia un processo complesso, i ricevitori GNSS ad alta precisione possono risolvere le ambiguità quasi istantaneamente. Per una breve descrizione delle ambiguità, vedi la sezione Misure GNSS – Precisione del codice e della fase della portante all’inizio di questo capitolo. Per ulteriori informazioni sulla risoluzione delle ambiguità, vedere i riferimenti alla fine di questo libro.
I rover determinano la loro posizione usando algoritmi che incorporano la risoluzione delle ambiguità e la correzione differenziale. Come DGNSS, l’accuratezza della posizione raggiungibile dal rover dipende, tra le altre cose, dalla sua distanza dalla stazione base (indicata come “linea di base”) e dalla precisione delle correzioni differenziali. Le correzioni sono accurate quanto la posizione nota della stazione base e la qualità delle osservazioni satellitari della stazione base. La selezione del sito è importante per minimizzare gli effetti ambientali come l’interferenza e il multipath, così come la qualità dei ricevitori e delle antenne della stazione base e del rover.
Network RTK
Network RTK è basato sull’uso di diverse stazioni permanenti ampiamente distanziate. A seconda dell’implementazione, i dati di posizionamento delle stazioni permanenti vengono regolarmente comunicati a una stazione di elaborazione centrale. Su richiesta dei terminali utente RTK, che trasmettono la loro posizione approssimativa alla stazione centrale, la stazione centrale calcola e trasmette le informazioni di correzione o la posizione corretta al terminale utente RTK. Il vantaggio di questo approccio è una riduzione complessiva del numero di stazioni base RTK necessarie. A seconda dell’implementazione, i dati possono essere trasmessi su collegamenti radio cellulari o altri mezzi senza fili.