La technique de positionnement que nous avons décrite au chapitre 2 est appelée positionnement par code, car le récepteur est en corrélation avec les codes pseudo-aléatoires transmis par quatre satellites ou plus et les utilise pour déterminer les portées des satellites. A partir de ces portées et en sachant où sont les satellites, le récepteur peut établir sa position à quelques mètres près.
Qu’est-ce que le RTK (Real-Time Kinematic) ?
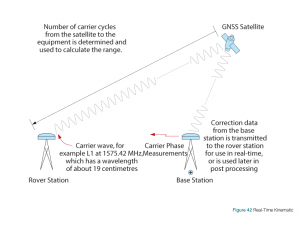
Le RTK est l’abréviation de Real-Time Kinematic et est une technique qui utilise la télémétrie par porteuse et fournit des portées (et donc des positions) qui sont des ordres de grandeur plus précis que ceux disponibles par le positionnement basé sur le code. Les techniques RTK sont complexes. Le concept de base consiste à réduire et à supprimer les erreurs communes à une paire de station de base et de rover, comme l’illustre la figure 42.
La précision du GPS RTK : Quelle est la précision de la RTK?
La RTK est utilisée pour les applications qui nécessitent des précisions plus élevées, comme le positionnement au niveau centimétrique, jusqu’à une précision de 1 cm + 1 ppm.
Calcul de la portée
À un niveau conceptuel très basique, la portée est calculée en déterminant le nombre de cycles de porteuse entre le satellite et la station rover, puis en multipliant ce nombre par la longueur d’onde de la porteuse.
Les portées calculées comprennent toujours des erreurs provenant de sources telles que l’horloge et les éphémérides du satellite, ainsi que les retards ionosphériques et troposphériques. Pour éliminer ces erreurs et profiter de la précision des mesures basées sur les porteuses, les performances RTK nécessitent que les mesures soient transmises de la station de base à la station du rover.
Un processus compliqué appelé « résolution d’ambiguïté » est nécessaire pour déterminer le nombre de cycles entiers. Bien que ce soit un processus complexe, les récepteurs GNSS de haute précision peuvent résoudre les ambiguïtés presque instantanément. Pour une brève description des ambiguïtés, consultez la section Mesures GNSS – Précision du code et de la phase de la porteuse plus haut dans ce chapitre. Pour plus d’informations sur la résolution des ambiguïtés, voir les références à la fin de ce livre.
Les rovers déterminent leur position à l’aide d’algorithmes qui intègrent la résolution des ambiguïtés et la correction différentielle. Comme pour le DGNSS, la précision de la position que peut atteindre le rover dépend, entre autres, de sa distance par rapport à la station de base (appelée « ligne de base ») et de la précision des corrections différentielles. Les corrections sont aussi précises que l’emplacement connu de la station de base et la qualité des observations satellitaires de la station de base. Le choix du site est important pour minimiser les effets environnementaux tels que les interférences et les trajets multiples, tout comme la qualité des récepteurs et des antennes de la station de base et du rover.
RTK en réseau
La RTK en réseau est basée sur l’utilisation de plusieurs stations permanentes largement espacées. Selon la mise en œuvre, les données de positionnement des stations permanentes sont régulièrement communiquées à une station centrale de traitement. A la demande des terminaux utilisateurs RTK, qui transmettent leur position approximative à la station centrale, cette dernière calcule et transmet les informations de correction ou la position corrigée au terminal utilisateur RTK. L’avantage de cette approche est une réduction globale du nombre de stations de base RTK nécessaires. Selon la mise en œuvre, les données peuvent être transmises par des liaisons radio cellulaires ou tout autre support sans fil.