Positioneringstekniken som vi beskrev i kapitel 2 kallas för kodbaserad positionering, eftersom mottagaren korrelerar med och använder de pseudorandomkoder som sänds av fyra eller fler satelliter för att bestämma avstånden till satelliterna. Utifrån dessa avstånd och genom att veta var satelliterna befinner sig kan mottagaren fastställa sin position med några meters noggrannhet.
Vad är RTK (Real-Time Kinematic)?
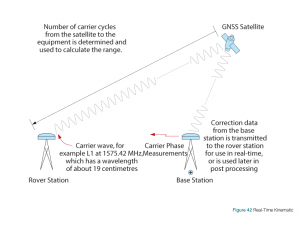
RTK står för Real-Time Kinematic och är en teknik som använder sig av bärarbaserad avståndsmätning och ger avstånd (och därmed positioner) som är flera storleksordningar mer exakta än de som är tillgängliga genom kodbaserad positionering. RTK-tekniker är komplicerade. Det grundläggande konceptet är att minska och ta bort fel som är gemensamma för ett basstations- och roverpar, vilket illustreras i figur 42.
RTK GPS-noggrannhet:
RTK används för tillämpningar som kräver högre noggrannhet, t.ex. positionering på centimeternivå, upp till 1 cm + 1 ppm noggrannhet.
Beräkning av räckvidd
På en mycket grundläggande konceptuell nivå beräknas räckvidden genom att bestämma antalet bärvågscykler mellan satelliten och roverstationen och sedan multiplicera detta antal med bärvågslängden.
De beräknade räckvidderna inkluderar fortfarande fel från sådana källor som satellitklocka och efemeriderider samt jonosfäriska och troposfäriska förseningar. För att eliminera dessa fel och för att dra nytta av precisionen hos bärvågsbaserade mätningar kräver RTK-prestanda att mätningar överförs från basstationen till roverstationen.
En komplicerad process som kallas ”ambiguity resolution” behövs för att bestämma antalet hela cykler. Trots att det är en komplicerad process kan GNSS-mottagare med hög precision lösa tvetydigheterna nästan omedelbart. En kort beskrivning av tvetydigheter finns i avsnittet om GNSS-mätningar – kod- och bärfasprecision tidigare i det här kapitlet. För ytterligare information om upplösning av tvetydigheter, se referenserna längst bak i den här boken.
Rovare bestämmer sin position med hjälp av algoritmer som innehåller upplösning av tvetydigheter och differentialkorrigering. I likhet med DGNSS beror den positionsnoggrannhet som kan uppnås av rovern bland annat på dess avstånd från basstationen (kallad ”baslinjen”) och noggrannheten hos differentialkorrigeringarna. Korrektionerna är lika exakta som basstationens kända plats och kvaliteten på basstationens satellitobservationer. Val av plats är viktigt för att minimera miljöeffekter som störningar och multipath, liksom kvaliteten på basstationens och roverns mottagare och antenner.
Nätverks-RTK
Nätverks-RTK bygger på användningen av flera permanenta stationer med stort avstånd till varandra. Beroende på genomförandet kommuniceras positioneringsdata från de permanenta stationerna regelbundet till en central bearbetningsstation. På begäran av RTK-användarterminaler, som överför sin ungefärliga position till centralstationen, beräknar och överför centralstationen korrigeringsinformation eller korrigerad position till RTK-användarterminalen. Fördelen med detta tillvägagångssätt är en övergripande minskning av det antal RTK-basstationer som krävs. Beroende på genomförandet kan data överföras via cellulära radiolänkar eller andra trådlösa medier.