Technika pozycjonowania, którą opisaliśmy w rozdziale 2, jest określana jako pozycjonowanie oparte na kodzie, ponieważ odbiornik koreluje z kodami pseudolosowymi przesyłanymi przez cztery lub więcej satelitów i wykorzystuje je do określania zasięgów satelitów. Na podstawie tych zasięgów i wiedzy o tym, gdzie znajdują się satelity, odbiornik może ustalić swoją pozycję z dokładnością do kilku metrów.
Co to jest RTK (Real-Time Kinematic)?
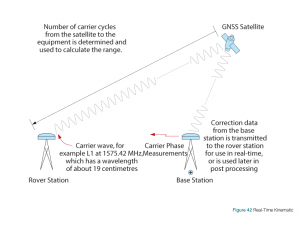
RTK oznacza Real-Time Kinematic i jest techniką, która wykorzystuje pomiary oparte na nośnikach i zapewnia zasięgi (a zatem pozycje), które są o rzędy wielkości bardziej precyzyjne niż te dostępne dzięki pozycjonowaniu opartemu na kodach. Techniki RTK są skomplikowane. Podstawowa koncepcja polega na zmniejszeniu i usunięciu błędów wspólnych dla pary stacji bazowej i łazika, jak pokazano na rysunku 42.
Dokładność GPS RTK: Jaka dokładność to RTK?
RTK jest wykorzystywany w zastosowaniach wymagających wyższych dokładności, takich jak pozycjonowanie na poziomie centymetra, z dokładnością do 1 cm + 1 ppm.
Obliczanie zasięgu
Na bardzo podstawowym poziomie koncepcyjnym, zasięg jest obliczany poprzez określenie liczby cykli nośnych pomiędzy satelitą a stacją łazika, a następnie pomnożenie tej liczby przez długość fali nośnej.
Obliczone zasięgi nadal zawierają błędy z takich źródeł jak zegar satelitarny i efemerydy oraz opóźnienia jonosferyczne i troposferyczne. Aby wyeliminować te błędy i wykorzystać precyzję pomiarów opartych na nośnikach, wykonanie RTK wymaga przesyłania pomiarów ze stacji bazowej do stacji łazika.
Do określenia liczby całych cykli potrzebny jest skomplikowany proces zwany „ambiguity resolution”. Mimo że jest to skomplikowany proces, precyzyjne odbiorniki GNSS mogą rozwiązywać niejednoznaczności niemal natychmiast. Krótki opis nieoznaczoności znajduje się w części Pomiary GNSS – Kod i precyzja fazy nośnej, wcześniej w tym rozdziale. Dalsze informacje na temat rozwiązywania nieoznaczoności można znaleźć w źródłach na końcu tej książki.
Rowery określają swoje położenie za pomocą algorytmów, które zawierają rozwiązywanie nieoznaczoności i korekcję różnicową. Podobnie jak w przypadku DGNSS, dokładność określenia pozycji możliwa do osiągnięcia przez łazik zależy między innymi od jego odległości od stacji bazowej (zwanej „linią bazową”) oraz od dokładności poprawek różnicowych. Korekty są tak dokładne, jak dokładna jest znana lokalizacja stacji bazowej oraz jakość obserwacji satelitarnych stacji bazowej. Wybór miejsca jest ważny dla zminimalizowania efektów środowiskowych, takich jak zakłócenia i wielodrożność, podobnie jak jakość odbiorników i anten stacji bazowej i łazika.
Sieć RTK
Sieć RTK opiera się na wykorzystaniu kilku szeroko rozstawionych stacji stałych. W zależności od implementacji, dane pozycjonowania ze stacji stałych są regularnie przekazywane do centralnej stacji przetwarzania. Na żądanie terminali użytkowników RTK, które przesyłają swoje przybliżone położenie do stacji centralnej, stacja centralna oblicza i przesyła informacje korekcyjne lub skorygowaną pozycję do terminala użytkownika RTK. Zaletą tego podejścia jest ogólna redukcja liczby wymaganych stacji bazowych RTK. W zależności od realizacji, dane mogą być przekazywane przez komórkowe łącza radiowe lub inne bezprzewodowe medium.
.