De positioneringstechniek die we in hoofdstuk 2 hebben beschreven wordt code-based positioning genoemd, omdat de ontvanger correleert met en gebruik maakt van de pseudorandom codes die door vier of meer satellieten worden uitgezonden om het bereik tot de satellieten te bepalen. Aan de hand van dit bereik en de positie van de satellieten kan de ontvanger zijn positie tot op enkele meters nauwkeurig bepalen.
Wat is RTK (Real-Time Kinematic)?
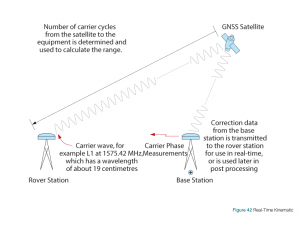
RTK staat voor Real-Time Kinematic en is een techniek waarbij gebruik wordt gemaakt van carrier-based ranging en waarmee bereiken (en dus posities) kunnen worden verkregen die ordes van grootte nauwkeuriger zijn dan die welke beschikbaar zijn via code-based positioning. RTK-technieken zijn ingewikkeld. Het basisconcept is het verminderen en verwijderen van fouten die een basisstation en rover paar gemeen hebben, zoals geïllustreerd in figuur 42.
RTK GPS Nauwkeurigheid: Welke nauwkeurigheid is RTK?
RTK wordt gebruikt voor toepassingen die hogere nauwkeurigheden vereisen, zoals plaatsbepaling op centimeterniveau, tot op 1 cm + 1 ppm nauwkeurig.
Berekening van het bereik
Op een zeer elementair conceptueel niveau, wordt het bereik berekend door het bepalen van het aantal draaggolf cycli tussen de satelliet en de rover station, dan vermenigvuldigen van dit aantal met de draaggolflengte.
De berekende bereiken nog steeds fouten van dergelijke bronnen zoals satelliet klok en efemeriden, en ionosferische en troposferische vertragingen. Om deze fouten te elimineren en om te profiteren van de precisie van carrier-gebaseerde metingen, vereist RTK prestatie dat metingen worden doorgegeven van het basisstation naar het rover station.
Een gecompliceerd proces genaamd “ambiguity resolution” is nodig om het aantal hele cycli te bepalen. Hoewel dit een ingewikkeld proces is, kunnen GNSS-ontvangers met hoge precisie de meerduidigheden bijna onmiddellijk oplossen. Voor een korte beschrijving van ambiguïteiten, zie de GNSS Metingen-Code en Carrier Fase Precisie sectie eerder in dit hoofdstuk. Voor meer informatie over meerduidigheidsresolutie, zie de referenties achterin dit boek.
Rovers bepalen hun positie met behulp van algoritmen die meerduidigheidsresolutie en differentiële correctie omvatten. Net als bij DGNSS hangt de nauwkeurigheid van de positie die de rover kan bereiken af van, onder andere, de afstand tot het basis station (de “basislijn” genoemd) en de nauwkeurigheid van de differentiële correcties. Correcties zijn zo nauwkeurig als de bekende locatie van het basis station en de kwaliteit van de satelliet waarnemingen van het basis station. De keuze van de locatie is belangrijk voor het minimaliseren van milieu-effecten zoals interferentie en multipath, evenals de kwaliteit van het basisstation en de rover ontvangers en antennes.
Netwerk RTK
Netwerk RTK is gebaseerd op het gebruik van verschillende ver uit elkaar liggende permanente stations. Afhankelijk van de uitvoering worden de plaatsbepalingsgegevens van de permanente stations regelmatig doorgegeven aan een centraal verwerkingsstation. Op verzoek van RTK-gebruikersterminals, die hun geschatte locatie aan het centrale station doorgeven, berekent het centrale station correctie-informatie of gecorrigeerde positie en zendt deze door naar de RTK-gebruikersterminal. Het voordeel van deze aanpak is een algemene vermindering van het aantal vereiste RTK-basisstations. Afhankelijk van de uitvoering kunnen de gegevens worden verzonden via cellulaire radioverbindingen of een ander draadloos medium.