A 2. fejezetben ismertetett helymeghatározási technikát kódalapú helymeghatározásnak nevezzük, mivel a vevő a négy vagy több műhold által sugárzott pszeudorandom kódokkal korrelál és azokat használja a műholdak távolságának meghatározásához. Ezekből a távolságokból és a műholdak helyének ismeretében a vevő néhány méteres pontossággal meg tudja határozni a helyzetét.
Mi az RTK (Real-Time Kinematic)?
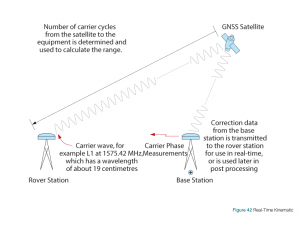
Az RTK a Real-Time Kinematic rövidítése, és egy olyan technika, amely hordozó alapú távolságmérést használ, és nagyságrendekkel pontosabb távolságokat (és ezáltal pozíciókat) biztosít, mint a kódalapú helymeghatározás. Az RTK technikák bonyolultak. Az alapkoncepció a bázisállomás és a rover páros közös hibáinak csökkentése és eltávolítása, amint azt a 42. ábra szemlélteti.
RTK GPS pontosság: Milyen pontosságú az RTK?
Az RTK-t olyan alkalmazásokhoz használják, amelyek nagyobb pontosságot igényelnek, mint például a centiméteres szintű helymeghatározás, akár 1 cm + 1 ppm pontosságig.
Távolságszámítás
Egy nagyon alapvető fogalmi szinten a távolságot úgy számítják ki, hogy meghatározzák a műhold és a roverállomás közötti vivőciklusok számát, majd ezt a számot megszorozzák a vivő hullámhosszával.
A számított távolságok még mindig tartalmazzák az olyan forrásokból származó hibákat, mint a műholdas óra és efemeridák, valamint az ionoszférikus és troposzférikus késések. E hibák kiküszöbölése és a vivőalapú mérések pontosságának kihasználása érdekében az RTK teljesítménye megköveteli, hogy a bázisállomásról méréseket továbbítsanak a roverállomáshoz.
A teljes ciklusok számának meghatározásához egy bonyolult folyamatra van szükség, amelyet “többértelműség-feloldásnak” neveznek. Annak ellenére, hogy ez egy összetett folyamat, a nagy pontosságú GNSS-vevők szinte azonnal képesek feloldani a kétértelműségeket. A kétértelműségek rövid leírását lásd a fejezet korábbi részében a GNSS-mérések-kód és vivőfázis pontossága című fejezetben. A többértelműség-feloldással kapcsolatos további információkért lásd a könyv végén található hivatkozásokat.
A műholdak a pozíciójukat olyan algoritmusok segítségével határozzák meg, amelyek magukban foglalják a többértelműség-feloldást és a differenciális korrekciót. A DGNSS-hez hasonlóan a rover által elérhető pozíciópontosság többek között a bázisállomástól való távolságától (az úgynevezett “alapvonaltól”) és a differenciálkorrekciók pontosságától függ. A korrekciók olyan pontosak, mint a bázisállomás ismert helye és a bázisállomás műholdas megfigyeléseinek minősége. A helyszín kiválasztása fontos a környezeti hatások, például az interferencia és a többszörös út minimalizálása szempontjából, csakúgy, mint a bázisállomás és a rover vevőkészülékeinek és antennáinak minősége.
Hálózati RTK
A hálózati RTK több, egymástól nagy távolságra lévő állandó állomás használatán alapul. A megvalósítástól függően az állandó állomások helymeghatározási adatait rendszeresen továbbítják egy központi feldolgozó állomásra. Az RTK felhasználói terminálok kérésére, amelyek hozzávetőleges helyzetüket a központi állomásnak továbbítják, a központi állomás kiszámítja és továbbítja a korrekciós információkat vagy a korrigált pozíciót az RTK felhasználói terminálnak. Ennek a megközelítésnek az az előnye, hogy összességében csökken a szükséges RTK bázisállomások száma. A megvalósítástól függően az adatok továbbítása történhet cellás rádiókapcsolaton vagy más vezeték nélküli közegen keresztül.