Die in Kapitel 2 beschriebene Ortungstechnik wird als codebasierte Ortung bezeichnet, weil der Empfänger mit den von vier oder mehr Satelliten gesendeten pseudozufälligen Codes korreliert und diese verwendet, um die Reichweite der Satelliten zu bestimmen. Ausgehend von diesen Entfernungen und dem Wissen, wo sich die Satelliten befinden, kann der Empfänger seine Position bis auf wenige Meter genau bestimmen.
Was ist RTK (Real-Time Kinematic)?
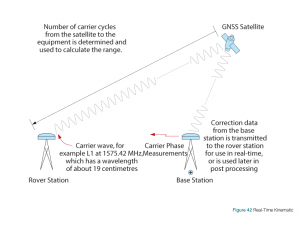
RTK steht für Real-Time Kinematic und ist eine Technik, die trägergestützte Entfernungsmessung verwendet und Entfernungen (und damit Positionen) liefert, die um Größenordnungen präziser sind als bei der codebasierten Positionierung. RTK-Techniken sind kompliziert. Das Grundkonzept besteht darin, Fehler, die bei einem Paar aus Basisstation und Rover auftreten, zu reduzieren und zu beseitigen, wie in Abbildung 42 dargestellt.
RTK-GPS-Genauigkeit: Welche Genauigkeit hat RTK?
RTK wird für Anwendungen verwendet, die eine höhere Genauigkeit erfordern, wie z. B. die Positionierung auf Zentimeter-Ebene mit einer Genauigkeit von bis zu 1 cm + 1 ppm.
Berechnung der Reichweite
Auf einer sehr grundlegenden konzeptionellen Ebene wird die Reichweite berechnet, indem die Anzahl der Trägerzyklen zwischen dem Satelliten und der Rover-Station bestimmt und diese Zahl dann mit der Trägerwellenlänge multipliziert wird.
Die berechneten Reichweiten enthalten immer noch Fehler aus Quellen wie Satellitenuhr und Ephemeriden sowie ionosphärische und troposphärische Verzögerungen. Um diese Fehler zu eliminieren und die Präzision der trägergestützten Messungen zu nutzen, müssen bei der RTK-Leistung Messungen von der Basisstation zur Rover-Station übertragen werden.
Um die Anzahl ganzer Zyklen zu bestimmen, ist ein komplizierter Prozess erforderlich, der als „Ambiguitätsauflösung“ bezeichnet wird. Obwohl es sich um einen komplexen Prozess handelt, können hochpräzise GNSS-Empfänger die Mehrdeutigkeiten fast sofort auflösen. Eine kurze Beschreibung der Mehrdeutigkeiten finden Sie im Abschnitt GNSS-Messungen – Code und Trägerphasengenauigkeit weiter oben in diesem Kapitel. Weitere Informationen zur Mehrdeutigkeitsauflösung finden Sie in den Referenzen am Ende dieses Buches.
Rover bestimmen ihre Position mit Algorithmen, die Mehrdeutigkeitsauflösung und differentielle Korrektur beinhalten. Wie bei DGNSS hängt die vom Rover erreichbare Positionsgenauigkeit unter anderem von seiner Entfernung zur Basisstation (als „Basislinie“ bezeichnet) und der Genauigkeit der differentiellen Korrekturen ab. Die Korrekturen sind so genau wie der bekannte Standort der Basisstation und die Qualität der Satellitenbeobachtungen der Basisstation. Die Auswahl des Standorts ist wichtig, um Umwelteinflüsse wie Interferenzen und Mehrwegeffekte zu minimieren, ebenso wie die Qualität der Empfänger und Antennen der Basisstation und des Rovers.
Netzwerk-RTK
Netzwerk-RTK basiert auf der Verwendung mehrerer weit auseinander liegender permanenter Stationen. Je nach Ausführung werden die Positionsdaten von den permanenten Stationen regelmäßig an eine zentrale Verarbeitungsstation übermittelt. Auf Anfrage von RTK-Benutzerterminals, die ihre ungefähre Position an die Zentralstation übermitteln, berechnet die Zentralstation Korrekturinformationen oder eine korrigierte Position und übermittelt diese an das RTK-Benutzerterminal. Der Vorteil dieses Konzepts besteht darin, dass die Anzahl der erforderlichen RTK-Basisstationen insgesamt verringert wird. Je nach Implementierung können die Daten über zellulare Funkverbindungen oder andere drahtlose Medien übertragen werden.