Technika určování polohy, kterou jsme popsali v kapitole 2, se označuje jako určování polohy na základě kódů, protože přijímač koreluje s pseudonáhodnými kódy vysílanými čtyřmi nebo více družicemi a používá je k určení vzdáleností k družicím. Na základě těchto vzdáleností a znalosti polohy družic může přijímač určit svou polohu s přesností na několik metrů.
Co je to RTK (Real-Time Kinematic)?
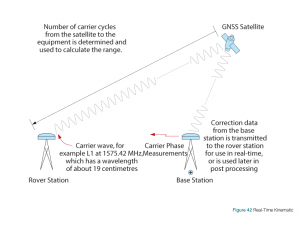
RTK je zkratka pro Real-Time Kinematic a jedná se o techniku, která využívá měření vzdáleností na základě nosičů a poskytuje vzdálenosti (a tedy polohy), které jsou řádově přesnější než ty, které jsou k dispozici při určování polohy na základě kódů. Techniky RTK jsou složité. Základní koncepce spočívá ve snížení a odstranění chyb společných pro dvojici základnové stanice a roveru, jak je znázorněno na obrázku 42.
Přesnost RTK GPS:
RTK se používá pro aplikace, které vyžadují vyšší přesnost, jako je například určování polohy na úrovni centimetrů s přesností až 1 cm + 1 ppm.
Výpočet dosahu
Na zcela základní koncepční úrovni se dosah vypočítá určením počtu cyklů nosné mezi družicí a stanicí roveru a následným vynásobením tohoto čísla vlnovou délkou nosné.
Vypočtené dosahy stále zahrnují chyby z takových zdrojů, jako jsou hodiny a efemeridy družice a ionosférické a troposférické zpoždění. K eliminaci těchto chyb a k využití přesnosti měření na nosné vyžaduje výkon RTK přenos měření ze základní stanice na stanici roveru.
K určení počtu celých cyklů je zapotřebí složitý proces nazývaný „rozlišení nejednoznačnosti“. Přestože se jedná o složitý proces, vysoce přesné přijímače GNSS dokáží dvojznačnosti vyřešit téměř okamžitě. Stručný popis nejednoznačností naleznete v části Měření GNSS – přesnost kódu a nosné fáze dříve v této kapitole. Další informace o řešení nejednoznačností naleznete v referencích na konci této knihy.
Přijímače určují svou polohu pomocí algoritmů, které zahrnují řešení nejednoznačností a diferenciální korekci. Stejně jako u DGNSS závisí přesnost polohy dosažitelná roverem mimo jiné na jeho vzdálenosti od základní stanice (označované jako „základní linie“) a na přesnosti diferenciálních korekcí. Korekce jsou tak přesné, jaká je známá poloha základní stanice a kvalita družicových pozorování základní stanice. Výběr stanoviště je důležitý pro minimalizaci vlivů prostředí, jako je rušení a vícecestnost, stejně jako kvalita přijímačů a antén základní stanice a roveru.
Síťová RTK
Síťová RTK je založena na použití několika široce rozmístěných permanentních stanic. V závislosti na implementaci jsou polohová data z permanentních stanic pravidelně předávána do centrální zpracovatelské stanice. Na žádost uživatelských terminálů RTK, které vysílají svou přibližnou polohu do centrální stanice, centrální stanice vypočítá a předá opravné informace nebo opravenou polohu uživatelskému terminálu RTK. Výhodou tohoto přístupu je celkové snížení počtu potřebných základnových stanic RTK. V závislosti na implementaci mohou být data přenášena prostřednictvím mobilních rádiových spojů nebo jiného bezdrátového média.
.