A técnica de posicionamento que descrevemos no Capítulo 2 é referida como posicionamento baseado em código, porque o receptor se correlaciona e usa os códigos pseudorandomais transmitidos por quatro ou mais satélites para determinar os intervalos para os satélites. A partir destes alcances e sabendo onde estão os satélites, o receptor pode estabelecer a sua posição a poucos metros.
O que é RTK (Real-Time Kinematic)?
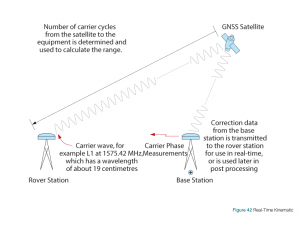
RTK significa Real-Time Kinematic e é uma técnica que utiliza o alcance baseado em portadora e fornece alcances (e portanto posições) que são ordens de magnitude mais precisas do que as disponíveis através do posicionamento baseado em código. As técnicas RTK são complicadas. O conceito básico é reduzir e remover erros comuns a uma estação base e um par de rover, como ilustrado na Figura 42.
Precisão do GPSRTK: Que precisão é RTK?
RTK é usada para aplicações que requerem maior precisão, como posicionamento ao nível do centímetro, até uma precisão de 1 cm + 1 ppm.
Cálculo do alcance
A um nível conceptual muito básico, o alcance é calculado determinando o número de ciclos portadores entre o satélite e a estação rover, depois multiplicando este número pelo comprimento de onda portadora.
Os alcances calculados ainda incluem erros de fontes como relógio e efemérides de satélite, e atrasos ionosféricos e troposféricos. Para eliminar estes erros e tirar partido da precisão das medições baseadas em portadoras, o desempenho RTK requer que as medições sejam transmitidas da estação base para a estação rover.
É necessário um processo complicado chamado “resolução de ambiguidade” para determinar o número de ciclos completos. Apesar de ser um processo complexo, os receptores GNSS de alta precisão podem resolver as ambigüidades quase instantaneamente. Para uma breve descrição das ambigüidades, veja a seção GNSS Measurements-Code and Carrier Phase Precision (Código de Medidas e Fase Portadora de Precisão GNSS), no início deste capítulo. Para mais informações sobre resolução de ambiguidades, veja as referências no verso deste livro.
Rovers determinam sua posição usando algoritmos que incorporam resolução de ambiguidade e correção diferencial. Tal como o DGNSS, a precisão da posição atingível pelo rover depende, entre outras coisas, da sua distância da estação base (referida como a “baseline”) e da precisão das correcções diferenciais. As correções são tão precisas quanto a localização conhecida da estação base e a qualidade das observações dos satélites da estação base. A seleção do local é importante para minimizar efeitos ambientais como interferência e multicaminhos, assim como a qualidade da estação base e dos receptores e antenas rover.
Network RTK
Network RTK é baseada no uso de várias estações permanentes amplamente espaçadas. Dependendo da implementação, os dados de posicionamento das estações permanentes são comunicados regularmente a uma estação central de processamento. A pedido dos terminais RTK do utilizador, que transmitem a sua localização aproximada para a estação central, a estação central calcula e transmite a informação de correcção ou posição corrigida para o terminal do utilizador RTK. O benefício desta abordagem é uma redução global do número de estações base RTK necessárias. Dependendo da implementação, os dados podem ser transmitidos através de links de rádio celular ou outro meio sem fio.