Luvussa 2 kuvattua paikannustekniikkaa kutsutaan koodipohjaiseksi paikannukseksi, koska vastaanotin korreloi neljän tai useamman satelliitin lähettämien pseudosatunnaiskoodien kanssa ja käyttää niitä etäisyyksien määrittämiseen satelliitteihin. Näiden etäisyyksien perusteella ja tietäen, missä satelliitit ovat, vastaanotin voi määrittää sijaintinsa muutaman metrin tarkkuudella.
Mikä on RTK (Real-Time Kinematic)?
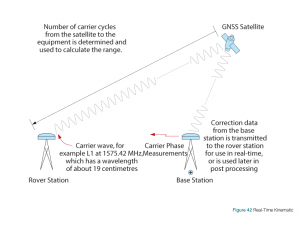
RTK on lyhenne sanoista Real-Time Kinematic (reaaliaikainen kinematiikka), ja se on tekniikka, jossa käytetään kantoaaltopohjaista etäisyysmittausta ja jonka avulla voidaan määrittää etäisyyksiä (ja näin ollen myös sijainteja) kertaluokkia tarkemmiksi kuin koodiin perustuvalla paikanmäärityksellä. RTK-tekniikat ovat monimutkaisia. Peruskonseptina on vähentää ja poistaa tukiaseman ja liikkujaparin yhteisiä virheitä, kuten kuvassa 42 on esitetty.
RTK GPS-tarkkuus: Mikä on RTK-tarkkuus?
RTK:ta käytetään sovelluksissa, jotka vaativat suurempia tarkkuuksia, kuten senttimetritason paikannusta, jopa 1 cm + 1 ppm tarkkuudella.
Kantaman laskeminen
Hyvin yksinkertaisella käsitteellisellä tasolla kantama lasketaan määrittämällä satelliitin ja rover-aseman välisten kantoaaltosyklien määrä ja kertomalla tämä luku kantoaallonpituudella.
Laskettuihin kantamuksiin sisältyy edelleen virheitä, jotka johtuvat sellaisista lähteistä kuin satelliitin kello ja efemeridit sekä ionosfäärin ja troposfäärin aiheuttamat viiveet. Näiden virheiden eliminoimiseksi ja kantoaaltopohjaisten mittausten tarkkuuden hyödyntämiseksi RTK-suorituskyky edellyttää mittausten lähettämistä tukiasemalta rover-asemalle.
Kokonaisjaksojen lukumäärän määrittämiseksi tarvitaan monimutkainen prosessi, jota kutsutaan ”epäselvyyden ratkaisuksi”. Vaikka prosessi on monimutkainen, korkean tarkkuuden GNSS-vastaanottimet pystyvät ratkaisemaan epäselvyydet lähes välittömästi. Lyhyt kuvaus epäselvyyksistä on kohdassa GNSS-mittaukset-koodi ja kantoaaltovaiheen tarkkuus aiemmin tässä luvussa. Lisätietoja epäselvyyksien resoluutiosta on tämän kirjan lopussa olevissa viitteissä.
Matkustajat määrittävät sijaintinsa käyttämällä algoritmeja, jotka sisältävät epäselvyyksien resoluution ja differentiaalikorjauksen. DGNSS:n tavoin roverin saavutettavissa oleva sijaintitarkkuus riippuu muun muassa sen etäisyydestä tukiasemasta (jota kutsutaan ”peruslinjaksi”) ja differentiaalikorjausten tarkkuudesta. Korjaukset ovat yhtä tarkkoja kuin tukiaseman tunnettu sijainti ja tukiaseman satelliittihavaintojen laatu. Sijoituspaikan valinta on tärkeää ympäristövaikutusten, kuten häiriöiden ja monipolkujen, minimoimiseksi, samoin kuin tukiaseman ja roverin vastaanottimien ja antennien laatu.
Verkko-RTK
Verkko-RTK perustuu useiden kaukana toisistaan sijaitsevien pysyvien asemien käyttöön. Toteutuksesta riippuen pysyviltä asemilta saatavat paikannustiedot välitetään säännöllisesti keskitettyyn käsittelyasemaan. RTK-käyttäjäpäätteiden pyynnöstä, jotka lähettävät likimääräisen sijaintinsa keskusasemalle, keskusasema laskee ja lähettää korjaustiedot tai korjatun sijainnin RTK-käyttäjäpäätteelle. Tämän lähestymistavan etuna on tarvittavien RTK-tukiasemien kokonaismäärän väheneminen. Toteutuksesta riippuen tiedot voidaan lähettää matkapuhelinradiolinkkien tai muun langattoman välineen kautta.