Den positioneringsteknik, som vi beskrev i kapitel 2, kaldes kodebaseret positionering, fordi modtageren korrelerer med og bruger de pseudorandomkoder, der sendes af fire eller flere satellitter, til at bestemme afstandene til satellitterne. Ud fra disse afstande og med viden om, hvor satellitterne befinder sig, kan modtageren bestemme sin position med en nøjagtighed på få meter.
Hvad er RTK (Real-Time Kinematic)?
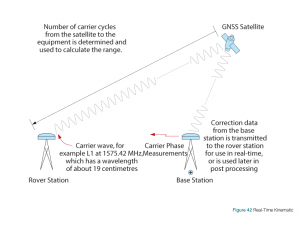
RTK står for Real-Time Kinematic og er en teknik, der anvender carrier-baseret afstandsmåling og giver afstande (og dermed positioner), der er flere størrelsesordener mere præcise end dem, der er tilgængelige ved hjælp af kodebaseret positionsbestemmelse. RTK-teknikker er komplicerede. Det grundlæggende koncept er at reducere og fjerne fejl, der er fælles for et par af basestationer og rovere, som illustreret i figur 42.
RTK GPS-præcision: Hvilken nøjagtighed er RTK?
RTK anvendes til applikationer, der kræver højere nøjagtighed, f.eks. positionering på centimeterniveau, op til 1 cm + 1 ppm nøjagtighed.
Rækkeviddeberegning
På et meget grundlæggende konceptuelt niveau beregnes rækkevidden ved at bestemme antallet af bærecyklusser mellem satellitten og roverstationen og derefter multiplicere dette tal med bærebølgelængden.
De beregnede rækkevidder omfatter stadig fejl fra sådanne kilder som satellitur og efemerider samt ionosfæriske og troposfæriske forsinkelser. For at eliminere disse fejl og for at drage fordel af præcisionen af bærebaserede målinger kræver RTK-ydelse, at målingerne transmitteres fra basisstationen til roverstationen.
Der er behov for en kompliceret proces kaldet “ambiguity resolution” for at bestemme antallet af hele cyklusser. Selv om det er en kompleks proces, kan GNSS-modtagere med høj præcision opløse tvetydighederne næsten øjeblikkeligt. For en kort beskrivelse af tvetydigheder henvises til afsnittet om GNSS-målinger – Præcision af kode og bærefasen – tidligere i dette kapitel. Yderligere oplysninger om opløsning af tvetydighed findes i referencerne bagest i denne bog.
Rovere bestemmer deres position ved hjælp af algoritmer, der inkorporerer opløsning af tvetydighed og differentiel korrektion. Ligesom DGNSS afhænger den positionsnøjagtighed, der kan opnås af roveren, bl.a. af dens afstand fra basestationen (kaldet “basislinjen”) og nøjagtigheden af differentialkorrektionerne. Korrektionerne er lige så nøjagtige som den kendte placering af basestationen og kvaliteten af basestationens satellitobservationer. Valg af sted er vigtigt for at minimere miljøpåvirkninger som f.eks. interferens og multipath, og det samme gælder kvaliteten af basisstationens og roverens modtagere og antenner.
Network RTK
Network RTK er baseret på brugen af flere permanente stationer med stor afstand til hinanden. Afhængigt af implementeringen sendes positioneringsdata fra de permanente stationer regelmæssigt til en central behandlingsstation. Efter anmodning fra RTK-brugerterminaler, som sender deres omtrentlige position til den centrale station, beregner og sender den centrale station korrektionsoplysninger eller korrigeret position til RTK-brugerterminalen. Fordelen ved denne fremgangsmåde er en samlet reduktion i antallet af nødvendige RTK-basestationer. Afhængigt af implementeringen kan dataene transmitteres via cellulære radiolinks eller andre trådløse medier.