La técnica de posicionamiento que describimos en el capítulo 2 se denomina posicionamiento basado en código, porque el receptor correlaciona y utiliza los códigos pseudoaleatorios transmitidos por cuatro o más satélites para determinar los rangos a los mismos. A partir de estos rangos y sabiendo dónde están los satélites, el receptor puede establecer su posición con una precisión de unos pocos metros.
¿Qué es RTK (Real-Time Kinematic)?
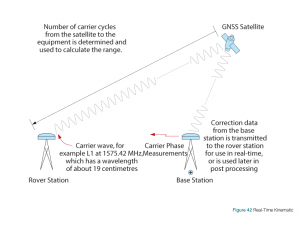
RTK significa Real-Time Kinematic (cinemática en tiempo real) y es una técnica que utiliza rangos basados en la portadora y proporciona rangos (y por lo tanto posiciones) que son órdenes de magnitud más precisos que los disponibles a través del posicionamiento basado en código. Las técnicas RTK son complicadas. El concepto básico es reducir y eliminar los errores comunes a un par de estación base y rover, como se ilustra en la figura 42.
Exactitud del GPS RTK: ¿Qué precisión es RTK?
RTK se utiliza para aplicaciones que requieren mayores precisiones, como el posicionamiento a nivel de centímetros, hasta 1 cm + 1 ppm de precisión.
Cálculo del alcance
A un nivel conceptual muy básico, el alcance se calcula determinando el número de ciclos de la portadora entre el satélite y la estación del rover, y luego multiplicando este número por la longitud de onda de la portadora.
Los alcances calculados aún incluyen errores de fuentes como el reloj del satélite y las efemérides, y los retrasos ionosféricos y troposféricos. Para eliminar estos errores y aprovechar la precisión de las mediciones basadas en la portadora, el rendimiento de RTK requiere que las mediciones se transmitan desde la estación base a la estación rover.
Se necesita un complicado proceso llamado «resolución de ambigüedad» para determinar el número de ciclos completos. A pesar de ser un proceso complejo, los receptores GNSS de alta precisión pueden resolver las ambigüedades casi instantáneamente. Para una breve descripción de las ambigüedades, consulte la sección Mediciones GNSS-Precisión de la fase del código y de la portadora, anterior en este capítulo. Para más información sobre la resolución de ambigüedades, consulte las referencias al final de este libro.
Los receptores determinan su posición utilizando algoritmos que incorporan la resolución de ambigüedades y la corrección diferencial. Al igual que el DGNSS, la precisión de la posición que puede alcanzar el rover depende, entre otras cosas, de su distancia a la estación base (denominada «línea de base») y de la precisión de las correcciones diferenciales. La precisión de las correcciones depende de la ubicación conocida de la estación base y de la calidad de las observaciones por satélite de la estación base. La selección del emplazamiento es importante para minimizar los efectos ambientales, como las interferencias y las trayectorias múltiples, al igual que la calidad de los receptores y antenas de la estación base y del rover.
RTK de red
El RTK de red se basa en el uso de varias estaciones permanentes muy espaciadas. Dependiendo de la implementación, los datos de posicionamiento de las estaciones permanentes se comunican regularmente a una estación central de procesamiento. A petición de los terminales de usuario RTK, que transmiten su ubicación aproximada a la estación central, ésta calcula y transmite información de corrección o posición corregida al terminal de usuario RTK. La ventaja de este enfoque es una reducción general del número de estaciones base RTK necesarias. Dependiendo de la implementación, los datos pueden ser transmitidos a través de enlaces de radio celular u otro medio inalámbrico.